



6-අක්ෂ අධ්යාපනය හෝ සන්ධි රොබෝ අත DIY ඩෙල්ටා හෝ කැමරා රොබෝ අත
පිරිවිතර
අක්ෂය:6
උපරිම බර: 4kg
නැවත නැවත සිදු වූ ස්ථානය: ±0.01mm
භාවිත ආර්ද්රතාවය: 20-80%
සෑෂ් පරිසරය: 0℃-45℃
ස්ථාපනය: බිම
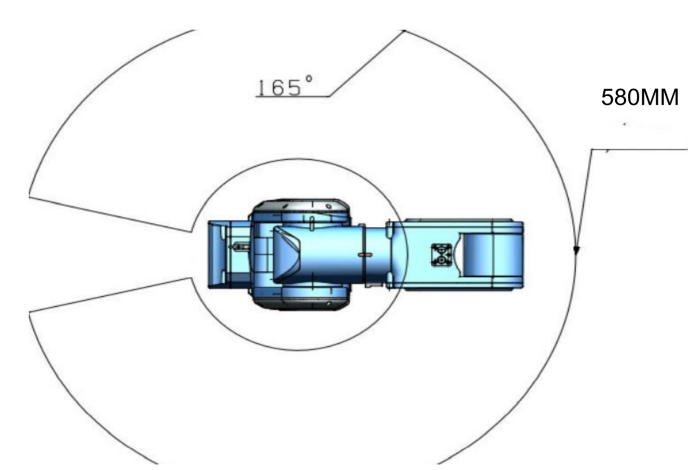
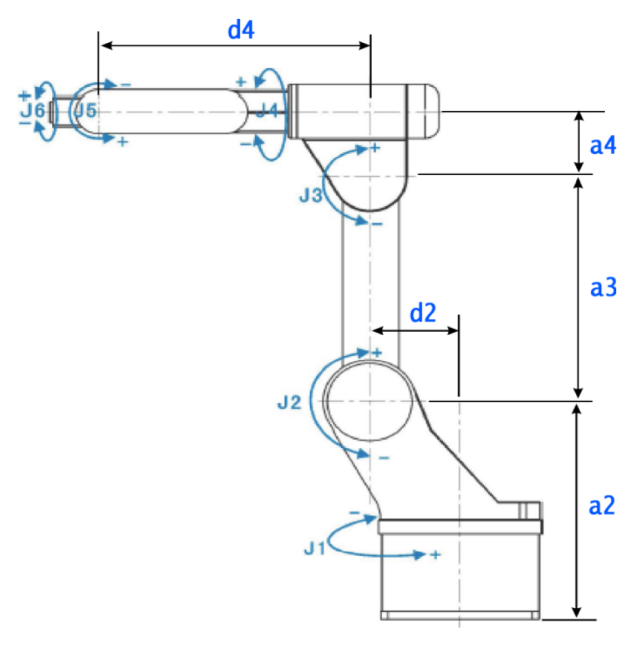
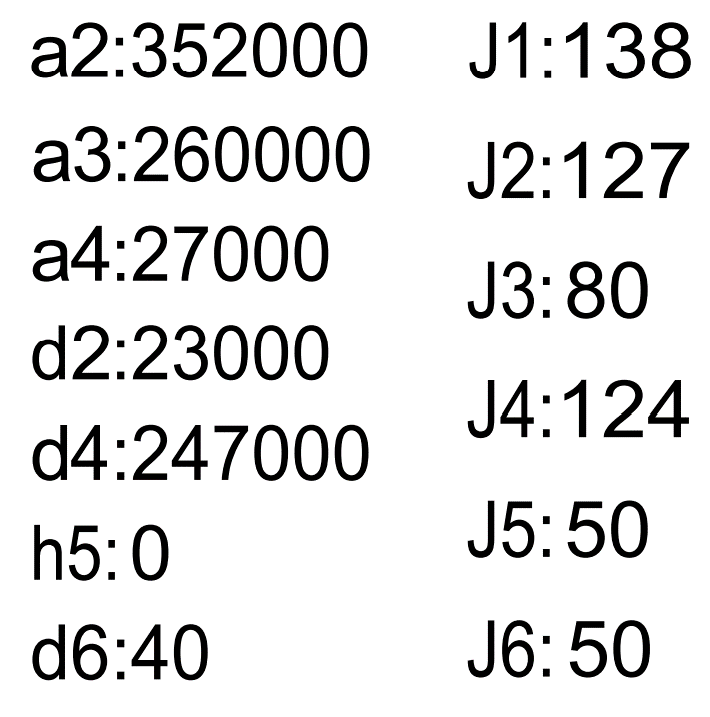
වැඩ කරන පරාසය: J1:±165°
J2:-100°~+120°
J3:+150° ~-60°
ජේ4:±175°
J5:+130° ~-30°
ජේ 6: ± 180 °
උපරිම වේගය: J1:260°/s
J2:250°/තත්පර
J3:250°/තත්පර
J4:250°/තත්පර
J5:200°/තත්පර
J6:760°/තත්පර
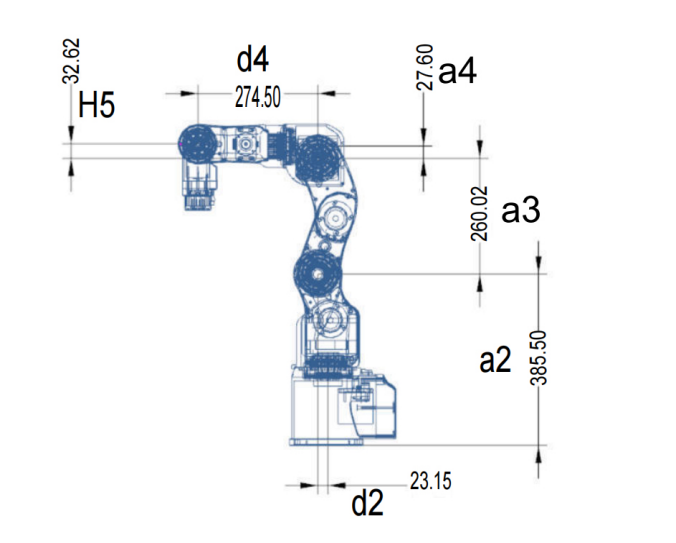
වැඩ කරන පරාසය:
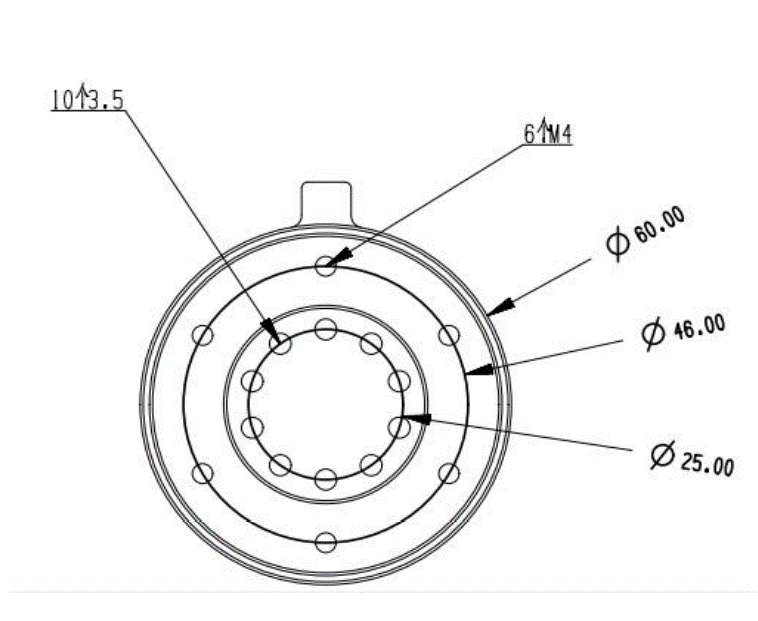
මූලික ස්ථාපනය:
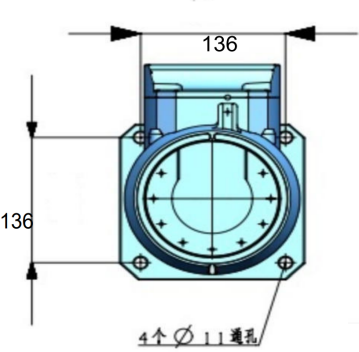
මූලික ස්ථාපනය:
අයදුම්පත්
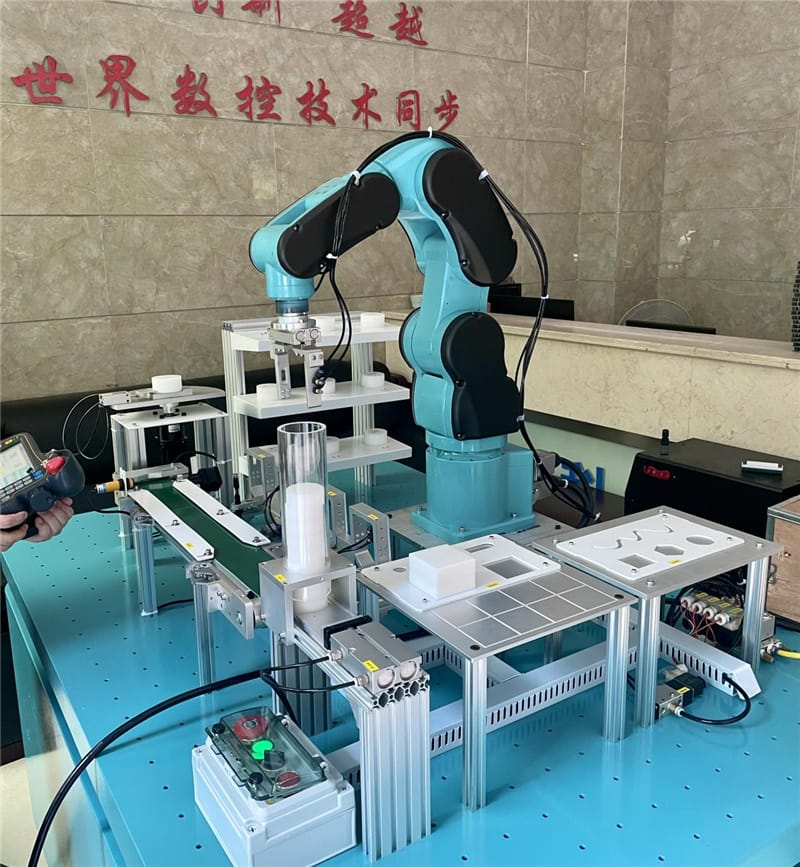
අධ්යාපනික යෙදුම්:
1. රොබෝ පද්ධතියේ මූලික සංයුතිය අධ්යයනය කිරීම.
2. රොබෝ ඉගැන්වීමේ පෙන්ඩනයේ ක්රමලේඛන සහ ඉගැන්වීමේ කාර්යයන් අධ්යයනය කිරීම.
3. රොබෝ නොබැඳි වැඩසටහන්කරණය පිළිබඳ මූලික දැනුම අධ්යයනය කිරීම.
4. රොබෝ io හි ක්රියාකාරිත්වය සහ යෙදුම් ක්රමලේඛනය අධ්යයනය කිරීම.
5. රොබෝ දෘශ්ය යෙදුම් අධ්යයනය කිරීමට
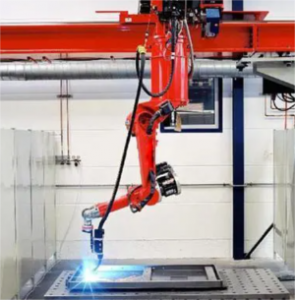
වාණිජ දර්ශන: රොබෝ අයිස්ක්රීම් රොබෝ බාර්ටෙන්ඩර් රොබෝ කෝපි රොබෝ කිරි තේ සැහැල්ලු කර්මාන්ත දර්ශන: මැනීම බෙදා හැරීම පරීක්ෂා කිරීම වර්ග කිරීම
නිෂ්පාදන විශේෂාංග
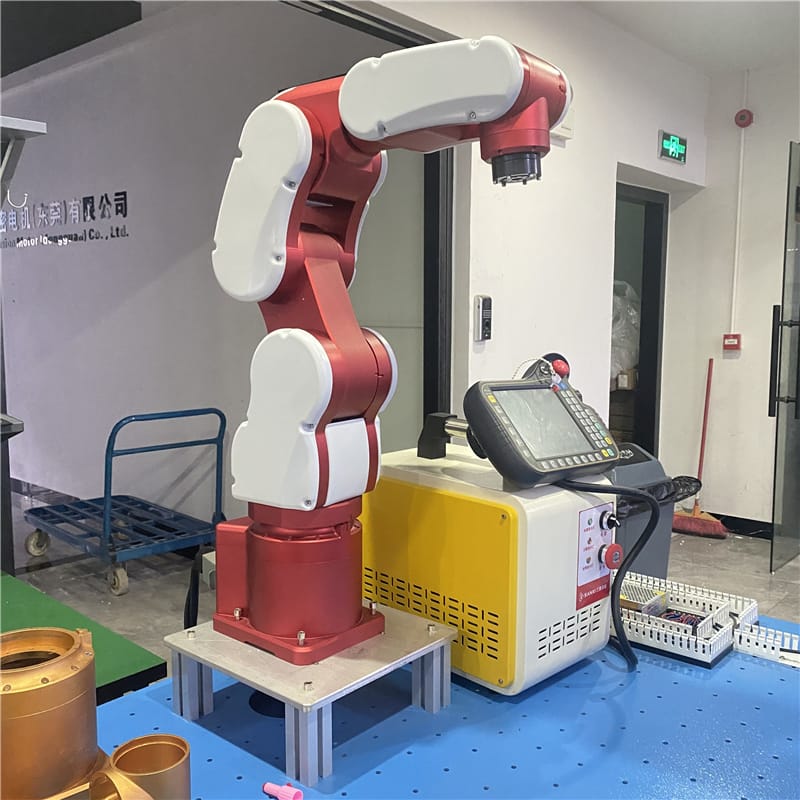
රොබෝ අත: රොබෝ අත CNC යන්ත්රෝපකරණ මධ්යස්ථානය හරහා ඇලුමිනියම් වාත්තු කිරීමෙන් සාදා ඇති අතර මතුපිට ප්ලාස්ටික් ඉසින අතර අලංකාර පෙනුමක් ඇත.
වෙන් කර ඇති කේබල් සිදුර: රොබෝ අතෙහි වෙන් කර ඇති කේබල් සිදුරු ඇති අතර ඒවා අලංකාර වන අතර හැසිරවීමේ ක්රියාකාරිත්වයට බාධාවක් නොවේ.ශ්වාසනාලයේ අවසානය වරාය සහ දත්ත කේබල් සම්බන්ධකය සඳහා වෙන් කර ඇත.
පාලක පැනලය: විශාල තිර LCD සංදර්ශකය, භාෂා සංදර්ශක ක්රමය පාරිභෝගික අවශ්යතා, සරල සහ පැහැදිලි ක්රියාකාරිත්වය සහ ක්රමලේඛනය, මාර්ගගත පරාමිති වෙනස් කිරීම සහ දෝෂ ස්වයං-රෝග විනිශ්චය කාර්යයන් මත පදනම් විය හැකිය.
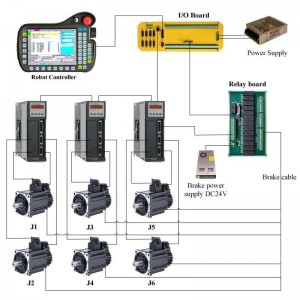
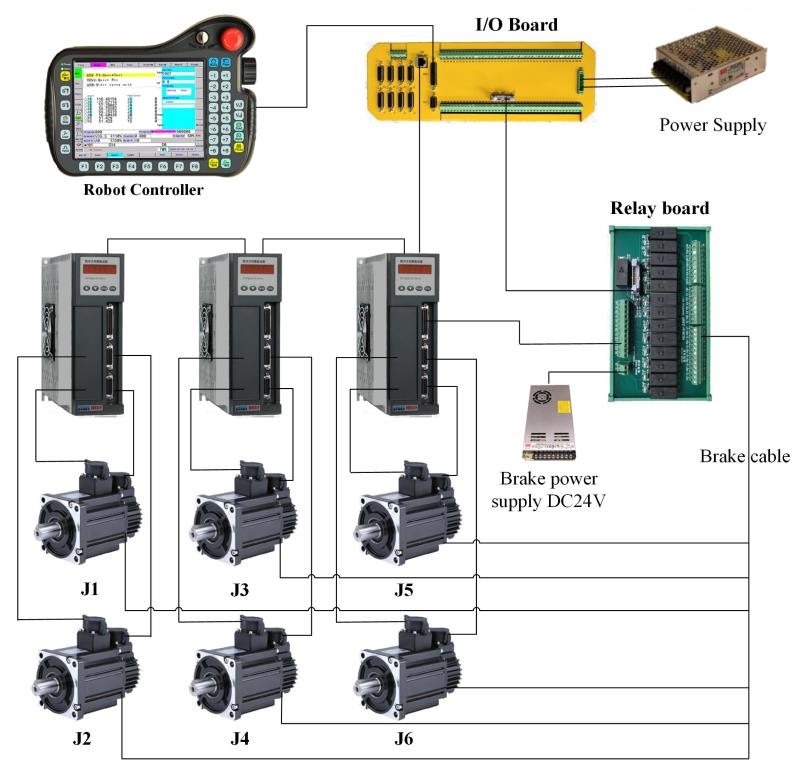
රොබෝ පාලන කැබිනට්ටුව: බුද්ධිමත් චලන පාලන පද්ධතිය කාර්මික පරිගණක තාක්ෂණය භාවිතා කරන අතර, සියලුම ඩිජිටල් සර්වෝ මොඩියුලය රොබෝවරයාගේ සෑම සන්ධියකම AC සර්වෝ මෝටර සඳහා රියදුරු බලය සපයයි.
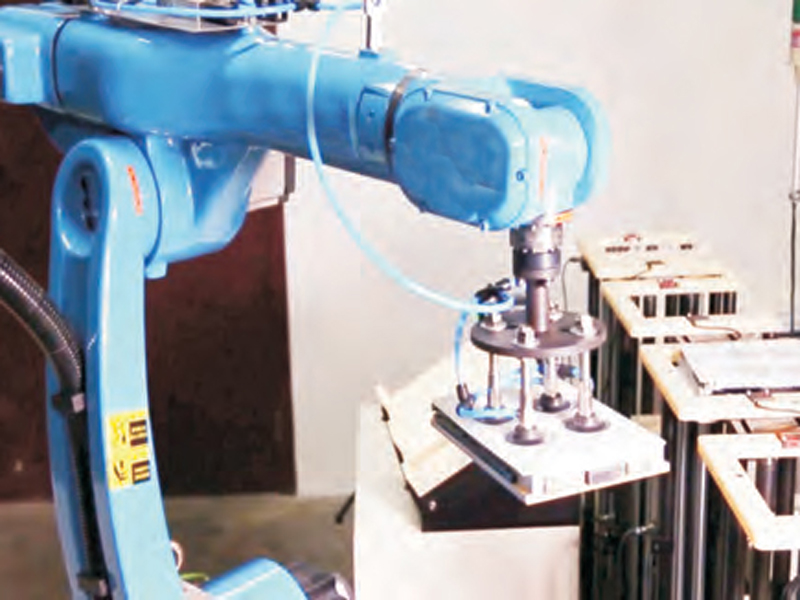
රොබෝ සවිකිරීම්: මෙවලම් සවිකිරීම අභිරුචිකරණය කළ අවශ්යතා අනුව විවිධ ගුරුත්වාකර්ෂණය සහ ප්රමාණය තෝරා ගත හැකි අතර, එය අවසාන ෆ්ලැන්ජ් මත ස්ථාපනය කර ඇති අතර එය සකස් කිරීමට පහසු සහ පුළුල් පරාසයක භාවිතයක් ඇත.